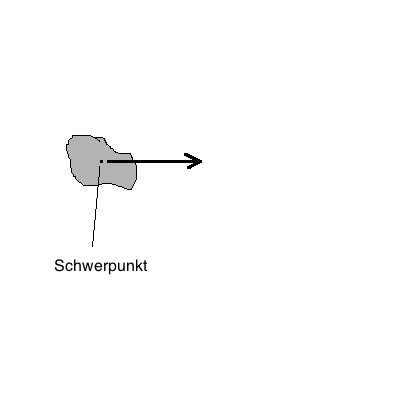
Translation
|
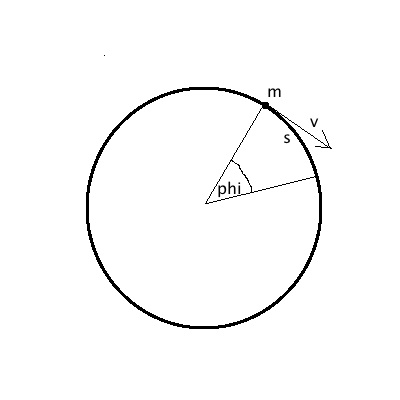
Umrechnung
|
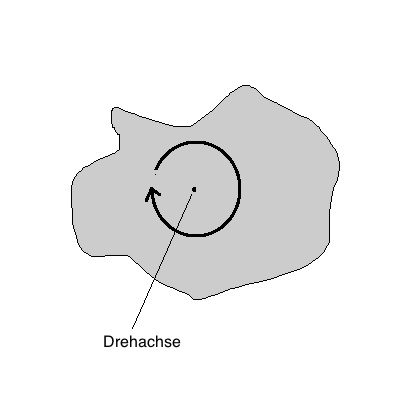
Rotation
|
 |
 |
 |
Strecke s
s = |
s = φ r mit r:Radius |
Drehwinkel φ im Bogenmaß
φ = dt |
| Geschwindigkeit |
v = ω r |
Winkelgeschwindigkeit
|
| Beschleunigung |
a = α r |
Winkelbeschleunigung |
Bewegungsgleichung der Translation:
s = 1/2 a t2 |
- |
Bewegungsgleichung der Rotation:
φ = 1/2 α t2 |
Geschwindigkeitsgleichung der Translation:
v = a t
|
- |
Geschwindigkeitsgleichung der Rotation:
ω = α t |
| Masse m |
Für eine Masse auf einer leichten Drehachse oder einen dünnwandigen
Hohlzylinder gilt:
J = m r2
Für andere Körper existieren entsprechend andere Gleichungen. |
Trägheitsmoment J |
Kraft F
Es gilt das 3. Newtonsche Axiom
F = m a |
M = F r, wenn F senkrecht r
sonst gilt:
M = F r sin(β) mit β: Winkel zwischen F und r
oder M = F ⊗ r |
Drehmoment M
Es gilt:
M = J α |
kinetische Energie
W = 1/2 m v2 |
- |
Rotationsenergie
W = 1/2 J ω2 |
Impuls
p = m v |
L = p
⊗ r |
Drehimpuls
L = J ω |


